Лаборатория „Пневматика”
Лабораторията е разположена в бл. 2, зала 2100-Г.
Лица за контакти:
доц. д-р Венцислав Василев
|








В лабораторията се осъществяват дейности, свързани с изследването и с изпитването пневматични машини с обемен принцип на действие /обемни машини/ и на различни елементи, изграждащи системите за пневмозадвижване. В нея могат да се реализират бързо почти неограничен брой чисто пневматични системи за задвижване и да бъде проследено действието им. Могат да се реализират и някои електро-пневматични системи.
Лабораторията разполага с бутален и винтов компресори, както и с пластинково вакуумпомпа. В нея има и четири универсални стенда за синтез на системи за пневмозадвижване, пневматичен манипулатор с три степени на свобода, пневматична позиционна система с две оси на движение, както и електро- пневматичен робот с пет степени на свобода. По сложните пневматични системи се управляват чрез програмируеми логически контролери. В лабораторията има и богат набор от табла с работещи системи за онагледяване, както и учебни табла.
Наличните средства осигуряват напълно учебния процес и позволяват провеждане на научни изследвания. В лабораторията могат да се изпитват и широка гама елементи за пневмозадвижване.
Лабораторията е оборудвана изцяло с нови елементи, след 2000 година. Машините в нея са закупени по научно- изследователси договори - доц. Ив. Дуков. Манипулаторът и роботът са възстановени от доц. В. Василев, а стендовете, демонстрационните и учебните табла са получени като двукратни големи дарения от фирма Festo-България и еднократно дарение от фирма SMC-България.
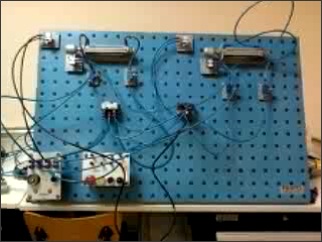
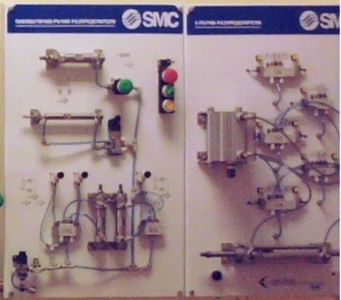
Универсални пневматични стендове
Предназначени са за учебна и научно-изследователска работа. Монтажните им маси се виждат по- горе. Позволяват реализирането на множество различни лабораторни упражнения със студенти. При нужда може да се монтира и изпита произволен елемент за пневмозадвижване.
 |
 |
Главна част на стендовете са техните монтажни маси. На тях могат да се подредят и закрепят различен брой от разполагаемите няколко десетки вида елементи.
Чрез свързването на елементите с шлаухи се реализират различни системи за задвижване и се включват в действие. При това се придобиват практически умения, анализират се причини за откази, извършват се настройки и т.н.
Част от типовите упражнения, които се провеждат със студенти са:
- пряко и непряко управление на цилиндър;
- приоритет на управляващия сигнал;
- логически операции със сигнали ("И", "ИЛИ", "НЕ", удължаване и скъсяване на продължителността на действие на сигнала, закъснение на включването и изключването, двоично делене на честотата на сигнала;
- управление на скоростта на цилиндър;
- управление на силата на цилиндър;
- управление на положението на цилиндър;
- управление на цилиндър по време;
- системи за последователност в движенията на цилиндри, без нужда от прекъсване на управляващия сигнал;
- системи за последователност в движенията на цилиндри, с прекъсване на управляващия сигнал;
- тактови системи за управление на последователността на движение;
- осигуряване на безопасността, блокировки и инициализация на системите.
Някои от реализиращите се пневматични системи са показани по-долу.
пряко и непряко управление на цилиндър;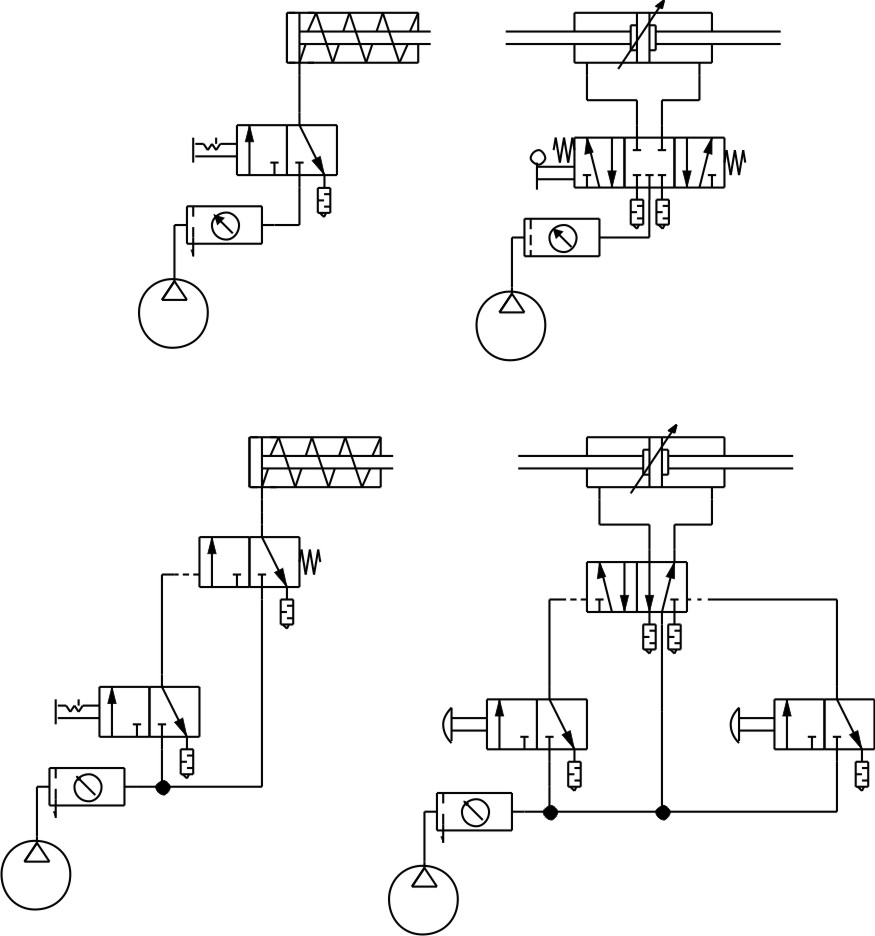
Натиснете за по-голям размер
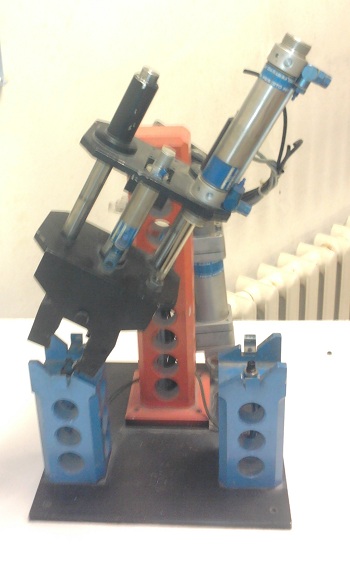
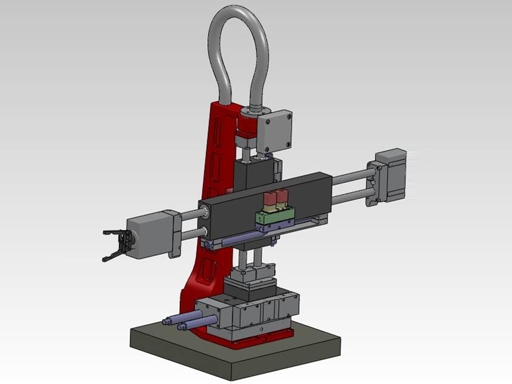
Пневматичен манипулатор
Манипулаторът има три степени на свобода и реализира преместване на детайли между две работни позиции в единичен и автоматичен режим. Задвижването е чисто пневматично, като отделните стъпки в движението се задават с пневматични тактови модули. Могат да се регулират времена на изчакване, скорости на движение и др. Манипулаторът бе възстановен в работоспособно състояние през 2010 г. от доц. В. Василев, със съдействието на инж. Стамен Николов.
 |
 Пневматичен управляващ блок Пневматичен управляващ блок |
Пневматичен робот
Пневматичният робот има пет степени на свобода. Разполага с клещовидно захващащо устройство, с две движения "захващане - отпускане",както и завъртане спрямо хоризонтална ос. Освен това, роботът придвижва клещовидното захващащо устройство по хоризонтала и вертикала и извършва едно ротационно движение спрямо вертикална ос. Задвижването на робота е пневматично, а управлението - електрическо.
 |
|
стендове "Обемни пневматични машини"
Упражненията върху пневматични машини с обемен принцип на действие, които се провеждат за нуждите на учебния процес, са:
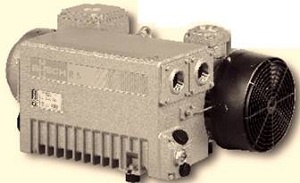
- изпитване на бутален компресор;
- изпитване на винтов компресор;
- изпитване на пластинкова вакуумпомпа.
 |
 |
 |
Демонстрационните табла дават представа за конструкцията на някои от пневматичните елементи и показват действието на типични системи за пневмозадвижване.
 |
 |
 |
 |