Лаборатория „Автоматично регулиране и управление и хидравлични системи”
Лабораторията обхваща няколко помещения: бл. 2, лаб. 2100б и лаб. 2002, и бл. 11, лаб. 11217.
Лице за контакт:
доц. д-р инж. Александър Митов
В катедра "Хидроаеродинамика и хидравлични машини" при Технически Университет – София е проектиран и реализиран експериментален стенд за изпитване на електрохидравлични кормилни устройства (ЕХКУ) тип OSPE 200. Стенда е разработен от ас. д-р инж. Александър Митов, под ръководството на проф. д-р инж. Илчо Ангелов. Той е предназначен за функционално изпитване на ЕХКУ с работен обем 200 cm3. Стендът дава възможност за управление на изпитваното ЕХКУ в два режима:
- Механичен – входното управляващо въздействие се формира от волан;
- Цифров – входното управляващо въздействие е електрически сигнал, генериран от електронен джойстик.
Извършен е синтез на хидравлична схема на стенд за изпитване на ЕХКУ тип OSPEC200 LSRM. Разработеното схемно решение е показано на Фиг.1. Реализацията на стенда е изпълнена въз основа на синтез на основните хидравлични и конструктивни параметри, както и на избор на компоненти за компановката му.
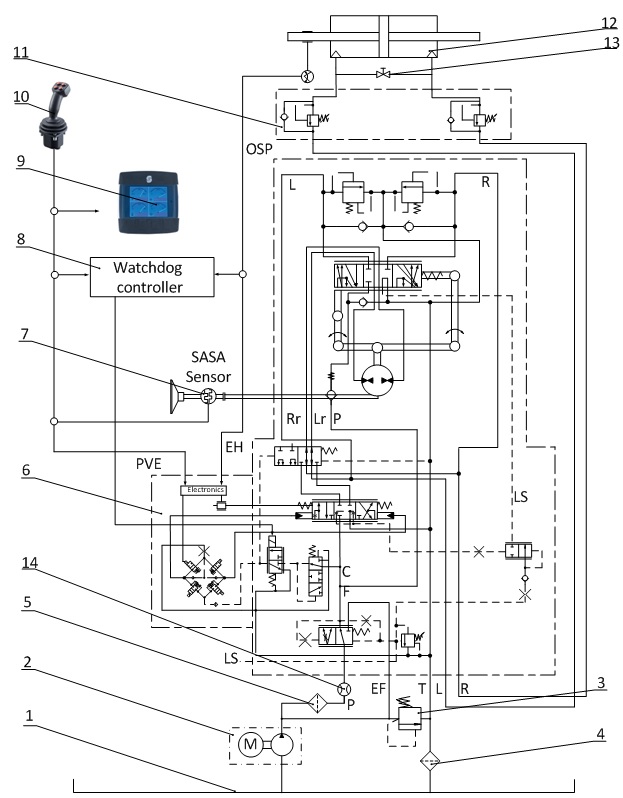
Фиг.1. Хидравлична схема на стенд за изпитване на ЕХКУ – кат."ХАД и ХМ" при ТУ-София
За да се анализира функционалността на изпитваното ЕХКУ, компановката на стенда е подчинена на изискването за отчитане, както на основните енергийни параметри в системата – налягане и дебит, така и на параметрите характеризиращи движението на буталото на изпълнителния сервоцилиндър – преместване и скорост. При включването на специализирана електронно-измервателна апаратура споменатите физически параметри могат да бъдат отчитани директно, не само в статичен, но и в динамичен режим.
За провеждането на адекватни спрямо действителните условия на работа изпитания, обектът на управление в проектирания стенд представлява двойнодействащ, равноплощен сервоцилиндър. Включените в стенда компоненти са идентични с вгражданите в електрохидравлични системи за управление и следене на траекторията на съвременни мобилни машини. За експерименталното изследване на различни режими на работа, освен промяна на входящите за системата параметри е предвидена и система за натоварване по налягане на сервоцилиндъра, посредством хидравличен блок с подпорни клапани (Фиг.1, поз.11). Двата подпорни клапана в разработения блок са свързани в двете работни камери на цилиндъра.

Фиг.2. Стенд за изпитване на ЕХКУ – кат.“ХАД и ХМ“ при ТУ-София
Разработена е системата за цифрово управление, в която за входно задаващо устройство е конфигуриран електронен джойстик. Структурното представяне на затворената система за автоматично управление (САУ) е показано на Фиг.3.
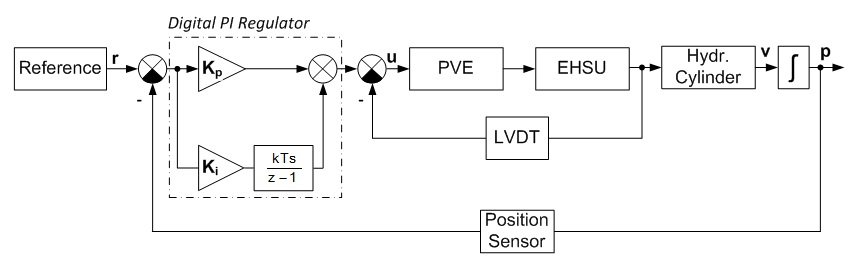
Фиг.3. Структурна схема на затворената САУ
В средата за програмиране (PLUS+1 Guide) на контролера MC012-022 е създадена и въведена програма (Фиг.4), която изчислява параметрите на управляващия сигнал. Моделът на програмиране предполага въвеждане на структура от функционални блокове, генериране на изпълним машинен код, последвано от зареждането и стартирането му върху платформата.
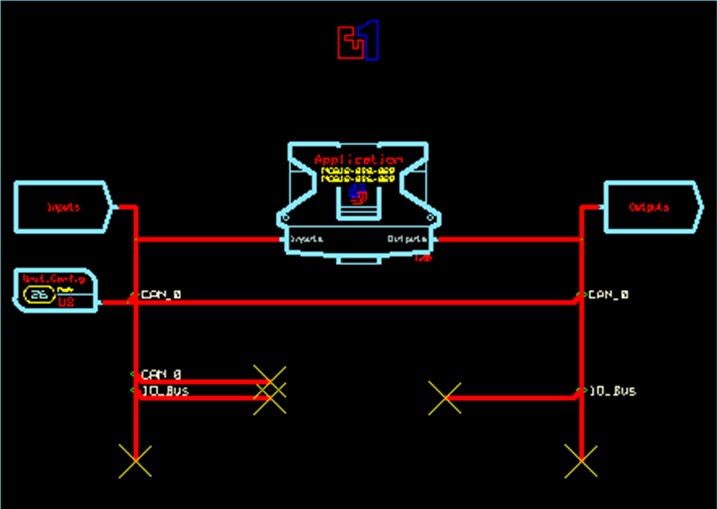
Фиг.3. Основен слой на CAN Busмрежата в средата за програмиране (PLUS+1 Guide)